Corridor
Forest
Large
Merge
Split
Scenarios with Multiple Cameras Filming Multiple Targets in Different Environmental Conditions
Abstract
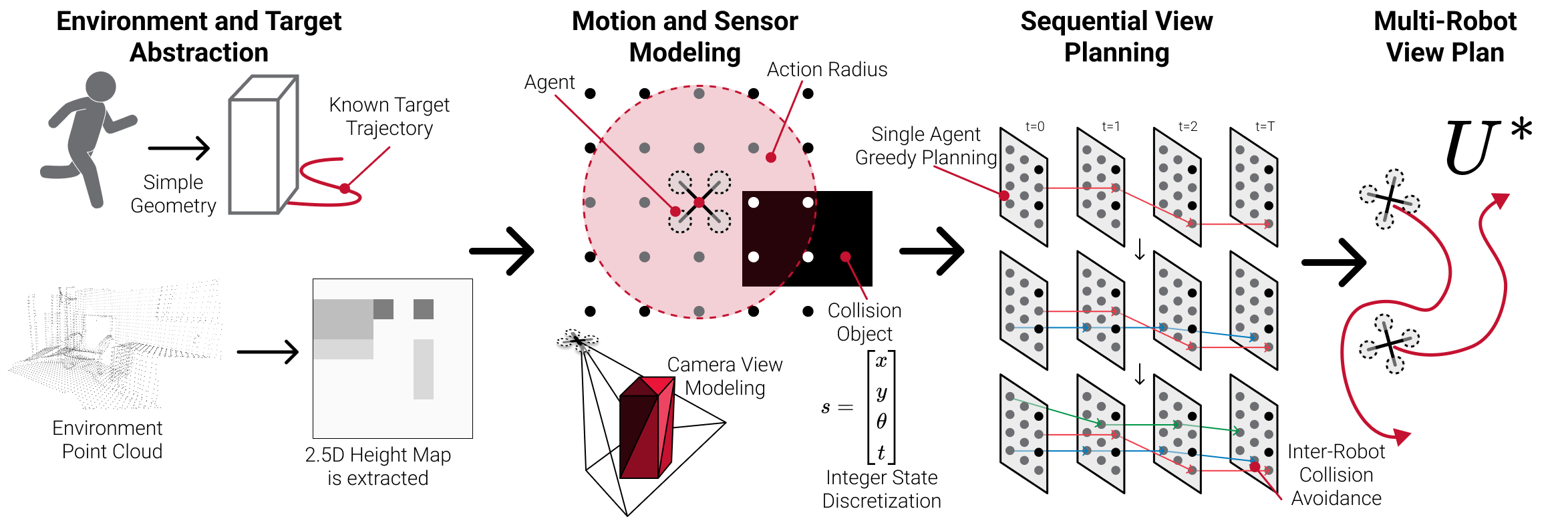
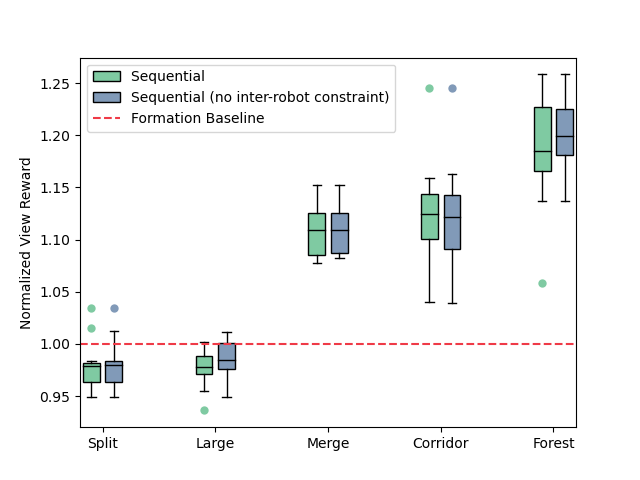
Deployment of teams of aerial robots could enable large-scale filming of dynamic groups of people (actors) in complex environments for applications in areas such as team sports and cinematography. Toward this end, methods for submodular maximization via sequential greedy planning can be used for scalable optimization of camera views across teams of robots but face challenges with efficient coordination in cluttered environments. Obstacles can produce occlusions and increase chances of inter-robot collision which can violate requirements for near-optimality guarantees. To coordinate teams of aerial robots in filming groups of people in dense environments, a more general view-planning approach is required. We explore how collision and occlusion impact performance in filming applications through the development of a multi-robot multi-actor view planner with an occlusion-aware objective for filming groups of people and compare with a formation planner and a greedy planner that ignores inter-robot collisions. We evaluate our approach based on five test environments and complex multi-actor behaviors. Compared with a formation planner, our sequential planner generates 14% greater view reward over the actors for three scenarios and comparable performance to formation planning on two others. We also observe near identical view rewards for sequential planning both with and without inter-robot collision constraints which indicates that robots are able to avoid collisions without impairing performance in the perception task. Overall, we demonstrate effective coordination of teams of aerial robots for filming groups that may split, merge, or spread apart and in environments cluttered with obstacles that may cause collisions or occlusions.
Greedy Perspectives: Performance
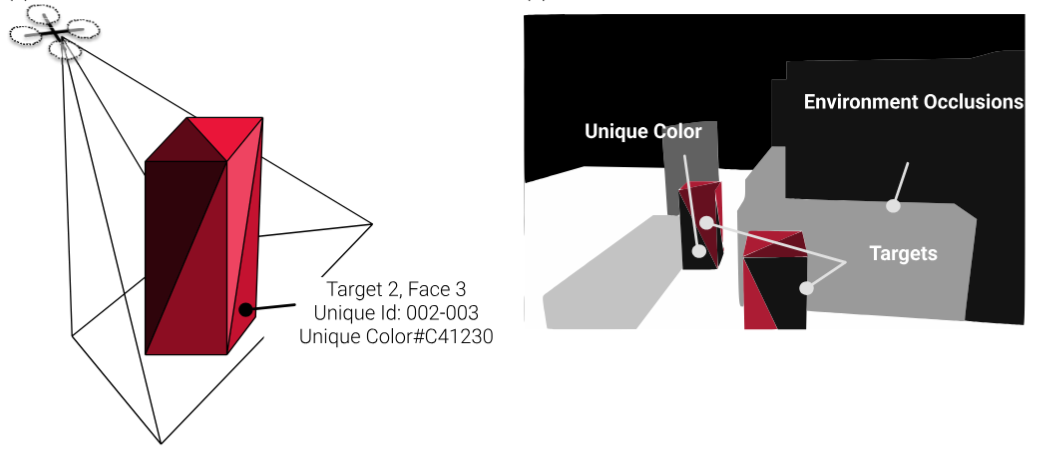
The planner's performance in each scenario is analyzed based on view rewards for formation and sequential planning, both with and without inter-robot collision constraints. We use drones with camera intrinsic parameters of 2500px focal length, 4000px image width, and 3000px image height. All drones are positioned 5 meters high with a 10-degree camera tilt from the horizon.
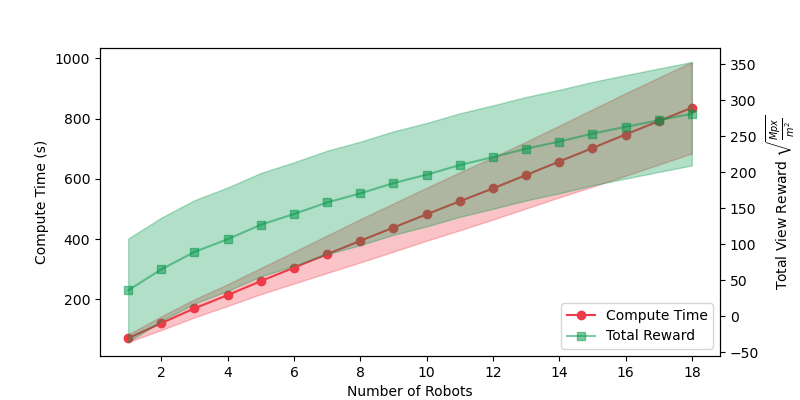
Time and Reward with Scaling Robot Numbers in the Large Scenario
BibTeX
@inproceedings{suresh2024greedy,
title={Greedy Perspectives: Multi-Drone View Planning for Collaborative Perception in Cluttered Environments},
author={Suresh, Krishna and Rauniyar, Aditya and Corah, Micah and Scherer, Sebastian},
booktitle={Proc. of the {IEEE/RSJ} Intl. Conf. on Intell. Robots and Syst.},
month=oct,
year={2024},
}